รายงาน
เรื่อง PLC : Programmable Logic Controller
สมาชิกในกลุ่ม
นาย โกวิท จันเขียว 5457051097
นาย พิทักษ์ รักมณี 5457051115
นาย อธิพันธ์ สวนจันทร์ 5457051134
เสนอโดย
อาจารย์ ธภัทร ชัยชูโชค
PLC คืออะไร? Programmable Logic Controller เครื่องควบคุมเชิงตรรกที่สามารถโปรแกรมได้
PLC : Programmable Logic Controller (มีต้นกำ เนิดจากประเทศสหรัฐอเมริกา) เป็นเครื่องควบคุมอัตโนมัติในโรงงานอุตสาหกรรม
ที่สามารถจะโปรแกรมได้ ถูกสร้างและพัฒนาขึ้นมาเพื่อทดแทนวงจรรีเลย์ อันเนื่องมาจากความต้องการที่อยากจะได้เครื่องควบ คุมที่มีราคาถูกสามารถใช้งานได้อย่างเอนกประสงค์ และสามารถเรียนรู้การใช้งานได้ง่าย
ข้อแตกต่างระหว่าง PLC กับ COMPUTER1. PLC ถูกออกแบบ และสร้างขึ้นเพื่อให้ทนต่อสภาพแวดล้อมในโรงงานอุตสาหกรรมโดยเฉพาะ
2. การโปรแกรมและการใช้งาน PLC ทำได้ง่ายไม่ยุ่งยากเหมือนคอมพิวเตอร์ทั่วไป PLC มีระบบการตรวจสอบตัวเองตั้งแต่ช่วงติดตั้ง
จนถึงช่วงการใช้งานทำให้การบำรุงรักษาทำได้ง่าย
3. PLCถูกพัฒนาให้มีความสามารถในการตัดสินใจสูงขึ้นเรื่อยๆทำให้การใช้งานสะดวกขณะที่วิธีใช้คอมพิวเตอร์ยุ่งยากและซับซ้อนขึ้นประวัติ PLC
ค.ศ.1969
PLCได้ถูกพัฒนาขึ้นมาครั้งแรกโดย บริษัท Bedford Associates โดยใช้ชื่อว่า Modular Digital Controller(Modicon) ให้กับโรงงานผลิตรถยนต์ในอเมริกาชื่อ General Motors Hydramatic Division บริษัท Allen-Bradley ได้เสนอระบบควบคุมโดยใช้ชื่อว่า PLC
ค.ศ.1970-1979
ได้มีการพัฒนาให ้PLC มีการประมวลผลที่เร็วมากขึ้นตามการเปลี่ยนแปลงของ Microprocessor ความสามารถในการสื่อสารข้อมูลระหว่าง PLC กับ PLC โดยระบบแรกคือ Modbus ของ Modicon เริ่มมีการใช้อินพุท/เอาท์พุทที่เป็นสัญญาณ Analog
ค.ศ.1980-1989
มีความพยายามที่จะสร้างมาตรฐานในการสื่อสารข้อมูลของ PLC โดยบริษัท General Motor ได้สร้างโปรโตคอลที่เรียกว่า manufacturing automation protocal (MAP) ขนาดของ PLC ลดลงเรื่อย ๆผลิตซอฟแวร์ที่สามารถโปรแกรม PLC ด้วยภาษา symbolic โดยสามารถโปรแกรมผ่านทาง personal computer แทนที่จะโปรแกรมผ่านทาง handheld หรือ programing terminal
ค.ศ.1990-ปัจัจจุบัน
ได้มีความพยายามในการที่จะทำให้ภาษาที่ใช้ในการโปรแกรม PLC มีมาตราฐานเดียวกันโดยใช้มาตรฐาน IEC1131-3 สามารถโปรแกรม PLC ได้ด้วย
- IL (Instruction List)
- LD (Ladder Diagrams)
- FBD (Function Block Diagrams)
- SFC (Sequential Function Chart)
- ST (Structured Text)
โครงสร้างโดยทั่วไปของ PLC
ลักษณะโครงสร้างภายในของ PLC ซึ่งประกอบด้วย
ที่สามารถจะโปรแกรมได้ ถูกสร้างและพัฒนาขึ้นมาเพื่อทดแทนวงจรรีเลย์ อันเนื่องมาจากความต้องการที่อยากจะได้เครื่องควบ คุมที่มีราคาถูกสามารถใช้งานได้อย่างเอนกประสงค์ และสามารถเรียนรู้การใช้งานได้ง่าย
ข้อแตกต่างระหว่าง PLC กับ COMPUTER1. PLC ถูกออกแบบ และสร้างขึ้นเพื่อให้ทนต่อสภาพแวดล้อมในโรงงานอุตสาหกรรมโดยเฉพาะ
2. การโปรแกรมและการใช้งาน PLC ทำได้ง่ายไม่ยุ่งยากเหมือนคอมพิวเตอร์ทั่วไป PLC มีระบบการตรวจสอบตัวเองตั้งแต่ช่วงติดตั้ง
จนถึงช่วงการใช้งานทำให้การบำรุงรักษาทำได้ง่าย
3. PLCถูกพัฒนาให้มีความสามารถในการตัดสินใจสูงขึ้นเรื่อยๆทำให้การใช้งานสะดวกขณะที่วิธีใช้คอมพิวเตอร์ยุ่งยากและซับซ้อนขึ้นประวัติ PLC
ค.ศ.1969
PLCได้ถูกพัฒนาขึ้นมาครั้งแรกโดย บริษัท Bedford Associates โดยใช้ชื่อว่า Modular Digital Controller(Modicon) ให้กับโรงงานผลิตรถยนต์ในอเมริกาชื่อ General Motors Hydramatic Division บริษัท Allen-Bradley ได้เสนอระบบควบคุมโดยใช้ชื่อว่า PLC
ค.ศ.1970-1979
ได้มีการพัฒนาให ้PLC มีการประมวลผลที่เร็วมากขึ้นตามการเปลี่ยนแปลงของ Microprocessor ความสามารถในการสื่อสารข้อมูลระหว่าง PLC กับ PLC โดยระบบแรกคือ Modbus ของ Modicon เริ่มมีการใช้อินพุท/เอาท์พุทที่เป็นสัญญาณ Analog
ค.ศ.1980-1989
มีความพยายามที่จะสร้างมาตรฐานในการสื่อสารข้อมูลของ PLC โดยบริษัท General Motor ได้สร้างโปรโตคอลที่เรียกว่า manufacturing automation protocal (MAP) ขนาดของ PLC ลดลงเรื่อย ๆผลิตซอฟแวร์ที่สามารถโปรแกรม PLC ด้วยภาษา symbolic โดยสามารถโปรแกรมผ่านทาง personal computer แทนที่จะโปรแกรมผ่านทาง handheld หรือ programing terminal
ค.ศ.1990-ปัจัจจุบัน
ได้มีความพยายามในการที่จะทำให้ภาษาที่ใช้ในการโปรแกรม PLC มีมาตราฐานเดียวกันโดยใช้มาตรฐาน IEC1131-3 สามารถโปรแกรม PLC ได้ด้วย
- IL (Instruction List)
- LD (Ladder Diagrams)
- FBD (Function Block Diagrams)
- SFC (Sequential Function Chart)
- ST (Structured Text)
โครงสร้างโดยทั่วไปของ PLC
ลักษณะโครงสร้างภายในของ PLC ซึ่งประกอบด้วย
1.ตัวประมวลผล(CPU) ทำหน้าที่คำนวณเเละควบคุม ซึ้งเปรียบเสมือนสมองของ PLC ภายในประกอบด้วยวงจรลอจิกหลายชนิดและมีไมโครโปรเซสเซอร์เบส (Micro Processor Based)ใช้แทนอุปกรณ์จำพวกรีเลย์ เคาน์เตอร์/ไทม์เมอร์ และซีเควนเซอร์ เพื่อให้ผู้ใช้สามารถออกแบบวงจรโดยใช้ Relay Ladder Diagram ได้ CPU จะยอมรับข้อมูลจากอุปกรณ์อินพุทต่างๆ จากนั้นจะทำการประมวลผลและเก็บข้อมูลโดยใช้โปรแกรมจากหน่วยความจำ หลังจากนั้นจะส่งส่งข้อมูลที่เหมาะสมและถูกต้องออกไปยังอุปกรณ์เอาท์พุท
2.หน่วยความจำ(Memory Unit) ทำหน้าที่เก็บรักษาโปรแกรมและข้อมูลที่ใช้ในการทำงาน โดยขนาดของหน่วยความจำจะถูกแบ่งออกเป็นบิตข้อมูล(Data Bit) ภายในหน่วยความจำ 1 บิต ก็จะมีค่าสภาวะทางลอจิก 0 หรือ 1แตกต่างกันแล้วแต่คำสั่ง ซึ่ง PLC ประกอบด้วยหน่วยความจำสองชนิดคือ ROM และRAM
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
3.หน่วยอินพุต-เอาต์พุต (Input-Output Unit) หน่วยอินพุต ทำหน้าที่รับสัญญาณจากอุปกรณ์ภายนอกแล้วแปลงสัญญาณให้เป็นสัญญาณที่เหมาะสมแล้วส่งให้หน่วยประมวลผลต่อไป
โครงสร้างโดยทั่วไปของ PLC
ลักษณะโครงสร้างภายในของ PLC ซึ่งประกอบด้วย
1.ตัวประมวลผล(CPU) ทำหน้าที่คำนวณเเละควบคุม ซึ้งเปรียบเสมือนสมองของ PLC ภายในประกอบด้วยวงจรลอจิกหลายชนิดและมีไมโครโปรเซสเซอร์เบส (Micro Processor Based)ใช้แทนอุปกรณ์จำพวกรีเลย์ เคาน์เตอร์/ไทม์เมอร์ และซีเควนเซอร์ เพื่อให้ผู้ใช้สามารถออกแบบวงจรโดยใช้ Relay Ladder Diagram ได้ CPU จะยอมรับข้อมูลจากอุปกรณ์อินพุทต่างๆ จากนั้นจะทำการประมวลผลและเก็บข้อมูลโดยใช้โปรแกรมจากหน่วยความจำ หลังจากนั้นจะส่งส่งข้อมูลที่เหมาะสมและถูกต้องออกไปยังอุปกรณ์เอาท์พุท
2.หน่วยความจำ(Memory Unit) ทำหน้าที่เก็บรักษาโปรแกรมและข้อมูลที่ใช้ในการทำงาน โดยขนาดของหน่วยความจำจะถูกแบ่งออกเป็นบิตข้อมูล(Data Bit) ภายในหน่วยความจำ 1 บิต ก็จะมีค่าสภาวะทางลอจิก 0 หรือ 1แตกต่างกันแล้วแต่คำสั่ง ซึ่ง PLC ประกอบด้วยหน่วยความจำสองชนิดคือ ROM และRAM
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
3.หน่วยอินพุต-เอาต์พุต (Input-Output Unit) หน่วยอินพุต ทำหน้าที่รับสัญญาณจากอุปกรณ์ภายนอกแล้วแปลงสัญญาณให้เป็นสัญญาณที่เหมาะสมแล้วส่งให้หน่วยประมวลผลต่อไป
หน่วยเอาต์พุต ทำหน้าที่รับข้อมูลจากตัวประมวลผลแล้วส่งต่อข้อมูลไปควบคุมอุปกรณ์ภายนอกเช่น ควบคุมหลอดไฟ มอเตอร์ และวาล์ว เป็นต้น
4.แหล่งจ่ายไฟ (Power Supply) ทำหน้าที่จ่ายพลังงานและรักษาระดับแรงดันไฟฟ้ากระแสตรงให้กับ CPU Unit หน่วยความจำและหน่วยอินพุท/ เอาท์พุท
5.อุปกรณ์ต่อร่วม (Peripheral Devices)
• PROGRAMMING CONSOLE
• EPROM WRITER
• PRINTER
• GRAPHIC PROGRAMMING
• CRT MONITOR
• HANDHELD
• etc
• PROGRAMMING CONSOLE
• EPROM WRITER
• PRINTER
• GRAPHIC PROGRAMMING
• CRT MONITOR
• HANDHELD
• etc
PLC ทำ งานอย่างไร?
ความรู้พื้นฐานด้านดิจิตอล (Number System)
ระบบเลขฐาน จัดเป็นระบบตัวเลขที่ใช้งานอยู่ใน PLC ดังนั้นผู้ใช้งานมีความจำเป็นต้องศึกษาระบบเลขฐานให้เข้าใจประกอบกับข้อมูลอื่นๆ เพื่อการใช้งานที่ถูกต้อง
ระบบเลขฐานสอง (Binary)
ระบบเลขฐานสิบ (Decimal)
ระบบเลขฐานสิบหก (Hexadecimal)
ระบบเลขฐานสิบ (Decimal)
ระบบเลขฐานสิบหก (Hexadecimal)
ความสัมพันธ์ของเลข BIN, BCD และ HEX สามารถกำหนดให้เป็นตารางได้ดังนี้
HEX | BCD | FOUR DIGIT BINARY | |||
2^3 = 8 | 2^2 = 4 | 2^1 = 2 | 2^0 = 1 | ||
0 | 0 | 0 | 0 | 0 | 0 |
1 | 1 | 0 | 0 | 0 | 1 |
2 | 2 | 0 | 0 | 1 | 0 |
3 | 3 | 0 | 0 | 1 | 1 |
4 | 4 | 0 | 1 | 0 | 0 |
5 | 5 | 0 | 1 | 0 | 1 |
6 | 6 | 0 | 1 | 1 | 0 |
7 | 7 | 0 | 1 | 1 | 1 |
8 | 8 | 1 | 0 | 0 | 0 |
9 | 9 | 1 | 0 | 0 | 1 |
A | - | 1 | 0 | 1 | 0 |
B | - | 1 | 0 | 1 | 1 |
C | - | 1 | 1 | 0 | 0 |
D | - | 1 | 1 | 0 | 1 |
E | - | 1 | 1 | 1 | 0 |
F | - | 1 | 1 | 1 | 1 |
BIN (Binary) = ระบบเลขฐานสอง
BCD (Binary Code Decimal) = ระบบเลขฐานสิบ
HEX (Hexadecimal) = ระบบเลขฐานสิบหก
BCD (Binary Code Decimal) = ระบบเลขฐานสิบ
HEX (Hexadecimal) = ระบบเลขฐานสิบหก
1. ระบบเลขฐานสอง (Binary) ระบบเลขฐานสอง (Binary) จะเป็นระบบเลขที่ง่ายกว่าเลขฐานสิบ เนื่องจากระบบเลขฐานสอง จะใช้ัอักขระแทนสองตัว ระบบเลขฐานสองนี้ใช้ในระบบดิจิตอลอิเล็กทรอนิกส์ด้วย เพราะว่าวงจรดิจิตอลจะมีเพียงสองสถานะ(two states)หรือระดับสัญญาณสองระดับ (two signal levels)โดยมีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 2 ตัว คือ 0 และ 1 หรืออาจใช้คำอื่นแทน
สถานะหนึ่ง | สถานะตรงข้าม |
0 | 1 |
Off | On |
Space | Mark |
Open | Closed |
Low | Hi |
ถ้าจะเทียบเลขฐานสองกับเลขฐานสิบแล้ว เลขฐานสองจะมีจำนวนหลักมากกว่า เพราะว่าในแต่ละหลักจะมีเลขได้สองค่า แต่ถ้าเป็นเลขฐานสิบแต่ละหลักจะมีเลขได้เก้าค่าคือ 0 ถึง 9
ระบบเลขฐานสิบ แต่ละหลักจะมีค่าเวจต์เป็นค่าสิบยกกำลังของหลักนั้น ระบบเลขฐานสองก็เช่นเดียวกัน จะมีฐานของเลขฐานสอง (base 2 system) การหาค่าเวจต์ในแต่ละหลักจะหาได้จากค่ายกกำลังสองของหลักนั้นๆ
ฐานสอง | ฐานสิบ |
2^0 | 1 |
2^1 | 2 |
2^2 | 4 |
2^3 | 8 |
2^4 | 16 |
2^5 | 32 |
2^6 | 64 |
2^7 | 128 |
2^8 | 256 |
2^9 | 512 |
2^10 | 1024 |
ค่าของ2ยกกำลังต่างๆเป็นฐานสิบ
ถ้าต้องการแปลงเลขฐานสองเป็นเลขฐานสิบก็สามารถทำได้ เช่นถ้าแปลงเลข 101101 เป็นเลขฐานสิบสามารถทำได้ดังนี้
(1x2^5)+(0x2^4)+(1x2^3)+(1x2^2)+(0x2^1)+(1x2^0) = 45
ตัวเลขฐานสอง 101101 จะมีค่าเท่ากับ 45 ในระบบเลขฐานสิบ
ระบบเลขฐานสองก็มีทศนิยมเช่นเดียวกับระบบเลขฐานสิบ ซึ่งเรียกว่าไบนารีพอยต์(binary point) โดยจะมีเครื่องหมายจุดแบ่งตัวเลขจำนวนเต็มกับเลขทศนิยมออกจากกัน ค่าเวจต์ของเลขทศนิยมแต่ละหลักจากซายไปขวาจะเป็นดังนี้ 1/2 , 1/4 , 1/8 , 1/16........ไปเรื่อยๆหรืออาจจะเขียนเป็นเลขยกกำลังค่าลบก็ได้
(1x2^5)+(0x2^4)+(1x2^3)+(1x2^2)+(0x2^1)+(1x2^0) = 45
ตัวเลขฐานสอง 101101 จะมีค่าเท่ากับ 45 ในระบบเลขฐานสิบ
ระบบเลขฐานสองก็มีทศนิยมเช่นเดียวกับระบบเลขฐานสิบ ซึ่งเรียกว่าไบนารีพอยต์(binary point) โดยจะมีเครื่องหมายจุดแบ่งตัวเลขจำนวนเต็มกับเลขทศนิยมออกจากกัน ค่าเวจต์ของเลขทศนิยมแต่ละหลักจากซายไปขวาจะเป็นดังนี้ 1/2 , 1/4 , 1/8 , 1/16........ไปเรื่อยๆหรืออาจจะเขียนเป็นเลขยกกำลังค่าลบก็ได้
ฐานสอง | ฐานสิบ |
2^ -1 | 0.5 |
2^ -2 | 0.25 |
2^ -3 | 0.125 |
2^ -4 | 0.0652 |
2^ -5 | 0.03125 |
2^ -6 | 0.015625 |
ค่าของ2ยกกำลังค่าลบ เป็นเลขฐานสิบ
ในระบบเลขฐานสิบนั้นแต่ละหลักจะเรียกว่าหลัก แต่ถ้่าเป็นระบบเลขฐานสองแต่ละหลักจะเรียกว่าบิต (bit) คำว่าบิต (bit) ย่อมาจาก binary digit ถ้าในงานดิจิตอลอิเล็กทรอนิกส์ จะพบคำว่า “Bit” บ่อยมาก
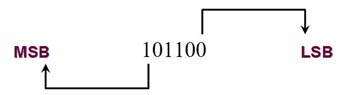
ในแต่ละหลักของเลขฐานสอง หลักซึ่งมีค่าเวจต์ต่ำสุดซึ่งอยู่ทางด้านขวาสุด จะเรียกว่าบิตที่มีความสำคัญต่ำสุด(LSB : Least Significant Bit) สำหรับด้านที่อยู่ซ้ายสุดจะมีค่าเวจต์สูงสุด เรียกว่าบิตที่มีความสำคัญสูงสุด(MSB : Most Significant Bit) ถ้าใช้ในระบบเลขฐานสิบจะเรียกว่า LSD(Least Significant Digit) และ MSD(Most Significant Digit) ในระบบดิจิตอลในบางครั้งเราจะเห็นเขียนว่า MSD , LSD กำกับเอาไว้ด้วย
ในแต่ละหลักของเลขฐานสอง หลักซึ่งมีค่าเวจต์ต่ำสุดซึ่งอยู่ทางด้านขวาสุด จะเรียกว่าบิตที่มีความสำคัญต่ำสุด(LSB : Least Significant Bit) สำหรับด้านที่อยู่ซ้ายสุดจะมีค่าเวจต์สูงสุด เรียกว่าบิตที่มีความสำคัญสูงสุด(MSB : Most Significant Bit) ถ้าใช้ในระบบเลขฐานสิบจะเรียกว่า LSD(Least Significant Digit) และ MSD(Most Significant Digit) ในระบบดิจิตอลในบางครั้งเราจะเห็นเขียนว่า MSD , LSD กำกับเอาไว้ด้วย
2. ระบบเลขฐานสิบ (Decimal) ระบบเลขฐานสิบ (Decimal) มีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 10 ตัว คือ 0 1 2 3 4 5 6 7 8 9 หรือเรียกอีกอย่างหนึ่งคือ BCD code อันนี้คงไม่ต้องกล่าวอะไรมากเพราะอยู่ใ้นชีวิตประจำวันอยู่แล้ว
3. ระบบเลขฐานสิบหก (Hexadecimal)
ระบบเลขฐานสิบหก (Hexadecimal) ฐานของมันจะมีค่าเป็น 16 ซึ่งจะมีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 16 ตัว คือ 0 1 2 3 4 5 6 7 8 9 A B C D E F (ตัวอักษร 6 ตัว แทน ตัวเลข 10 –15 ตามลำดับ)
ในงานด้านอิเล็กทรอนิกส์และคอมพิวเตอร์ ตัวเลขที่ใช้ในการประมวลผลจะเป็นเลขฐานสอง แต่ถ้าตัวเลขมีค่ามากจะทำให้เลขฐานสองมีหลายหลัก จึงใช้เลขฐานสิบหกแทนเลขฐานสอง แล้วจะมีการแปลงเลขฐานสิบหกเป็นเลขฐานสองอีกทีหนึ่ง เลขฐานสิบหกนั้นจะนิยมใช้มากในคอมพิวเตอร์ ถ้าหากไบนารี่ที่ใ่ช้ในระบบคอมพิวเตอร์เป็นแบบ 8 บิต ซึ่งแทนเลขฐานสิบหกได้ตั้งเเต่ 0 ถึง 255 แต่สามารถแทนด้วยเลขฐานสิบหกเพียงสองหลักเท่านั้น ถ้าหากเรามีเลขฐานสิบ 99,999,999 ถ้าเขียนแทนด้วยเลขไบนารีจะต้องใช้หลายบิต แต่ถ้าเขียนเเทนด้วยเลขฐานสิบหกจะใช้เพียงไม่กี่หลัก
ค่าสิบหกสามารถแทนได้ด้วยสองยกกำลังสี่ หรือ 16 = 2^4 ดังนั้นเลขฐานสิบหกจึงสามารถเขียนแทนด้วยเลขฐานสองได้สี่บิต โดยมีค่าตั้งแต่ 0000 ถึง 1111 หรือแทนด้วยอักษร 0 ถึง F ความสัมพันธ์ระหว่างเลขฐานสอง ฐานสิบ และฐานสิบหกแสดงใ้ว้ในตารางความสัมพันธ์ของเลข BIN, BCD และ HEX
การแปลงเลขฐานสองเป็นเลขฐานสิบหกก็สามารถทำได้โดยง่าย โดยจัดเลขฐานสองตั้งแต่บิตแรกจนถึงบิตสุืดท้ายเป็นกลุ่มๆ โดยจัดกลุ่มละ 4 บิตและแทนค่าด้วยเลขฐานสิบหกแต่ละค่าให้สอดคล้องกันตัวอย่างต่อไปนี้จะเป็นการแปลงเลขฐานสองเป็นฐานสิบหก
—การแปลงเลข 10101011111101 เป็นเลขฐานสิบหกสามารถทำได้โดย การแบ่งกลุ่ม ๆ ละ 4 บิตดังนี้
0010 1010 1111 1101
จะเห็นว่าถ้าแบ่งเป็นกลุ่ม ๆ ละ 4 บิต จะมีสองบิตบนที่จัดกลุ่มไม่ได้ ก็ให้เติม 0 ไปในกลุ่มนั้นให้ครบ 4 บิต จากนั้นแทนค่าตัวเลขแต่ละกลุ่มด้วยเลขฐานสิบหกดังนี้
2 A F D
ดังนั้นจะได้ 10101011111101 มีค่าเท่ากับ 2AFD
ให้จำใว้ว่าเลขฐานสิบหกที่เรามองเห็นนั้นเป็นการใช้แทนเลขไบนารีเพราะ CPU ไม่สามารถประมวลผลเลขฐานสิบหกได้
ประเภทของข้อมูลเช่น บิต, ไบต์, เวิร์ด
ข้อมูลภายใน PLC จะมีคำจำกัดความที่เรียกกันคือ บิต (BIT), ไบต์ (Byte), เวิร์ด (Word) หลักการเรียกและความหมายของแต่ละคำมีดังนี้
1 Word = 2 Byte
1 Byte = 2 Digit
1 Digit = 4Bit
เช่น ข้อมูลขนาด 256 กิโลบิต (kBit) จะสามารถเก็บข้อมูลได้กี่กิโลไบต์ ?
8 บิต = 1 ไบต์
256 กิโลบิต = (256 x 1000)/8 = 32,000 ไบต์
= 32 กิโลไบต์
หน่วยความจำ ขนาด 6 kWords ถ้าจะเปลี่ยนหน่วยเป็น kB. จะได้เท่าไร ?
1 Word = 2 ไบต์
6 kWord = 2 x 6 x 1000 = 12,000 ไบต์
= 12 กิโลไบต์
ลอจิกเกต (LOGIC GATE)
PLC ทำงานด้วยหลักการของ binary คือ เป็นอย่างใดอย่างหนึ่งใน 2 สถานะ เช่น สูงหรือต่ำ
ปิดหรือเปิด, 0 หรือ 1 เกตเป็นสัญลักณ์ของวงจรที่่ใช้แทนลอจิก ระบบที่เรียกว่าพีชคณิตบูลลีนใช้แสดงอินพุตและเอาท์พุต เกตพื้นฐานมีดังนี้
อินเวอร์เตอร์ INVERTER-NOT
อินเวอร์เตอร์เป็นเกตที่มี 1 อินพุต 1 เอาท์พุตท์ วงจรให้เอาท์พุตที่ตรงข้ามกับอินพุต เช่นถ้าอินพุตเป็น 0 เอาท์พุตจะเป็น 1 ถ้าอินพุตเป็น 1 เอาท์พุตจะเป็น 0
3. ระบบเลขฐานสิบหก (Hexadecimal)
ระบบเลขฐานสิบหก (Hexadecimal) ฐานของมันจะมีค่าเป็น 16 ซึ่งจะมีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 16 ตัว คือ 0 1 2 3 4 5 6 7 8 9 A B C D E F (ตัวอักษร 6 ตัว แทน ตัวเลข 10 –15 ตามลำดับ)
ในงานด้านอิเล็กทรอนิกส์และคอมพิวเตอร์ ตัวเลขที่ใช้ในการประมวลผลจะเป็นเลขฐานสอง แต่ถ้าตัวเลขมีค่ามากจะทำให้เลขฐานสองมีหลายหลัก จึงใช้เลขฐานสิบหกแทนเลขฐานสอง แล้วจะมีการแปลงเลขฐานสิบหกเป็นเลขฐานสองอีกทีหนึ่ง เลขฐานสิบหกนั้นจะนิยมใช้มากในคอมพิวเตอร์ ถ้าหากไบนารี่ที่ใ่ช้ในระบบคอมพิวเตอร์เป็นแบบ 8 บิต ซึ่งแทนเลขฐานสิบหกได้ตั้งเเต่ 0 ถึง 255 แต่สามารถแทนด้วยเลขฐานสิบหกเพียงสองหลักเท่านั้น ถ้าหากเรามีเลขฐานสิบ 99,999,999 ถ้าเขียนแทนด้วยเลขไบนารีจะต้องใช้หลายบิต แต่ถ้าเขียนเเทนด้วยเลขฐานสิบหกจะใช้เพียงไม่กี่หลัก
ค่าสิบหกสามารถแทนได้ด้วยสองยกกำลังสี่ หรือ 16 = 2^4 ดังนั้นเลขฐานสิบหกจึงสามารถเขียนแทนด้วยเลขฐานสองได้สี่บิต โดยมีค่าตั้งแต่ 0000 ถึง 1111 หรือแทนด้วยอักษร 0 ถึง F ความสัมพันธ์ระหว่างเลขฐานสอง ฐานสิบ และฐานสิบหกแสดงใ้ว้ในตารางความสัมพันธ์ของเลข BIN, BCD และ HEX
การแปลงเลขฐานสองเป็นเลขฐานสิบหกก็สามารถทำได้โดยง่าย โดยจัดเลขฐานสองตั้งแต่บิตแรกจนถึงบิตสุืดท้ายเป็นกลุ่มๆ โดยจัดกลุ่มละ 4 บิตและแทนค่าด้วยเลขฐานสิบหกแต่ละค่าให้สอดคล้องกันตัวอย่างต่อไปนี้จะเป็นการแปลงเลขฐานสองเป็นฐานสิบหก
—การแปลงเลข 10101011111101 เป็นเลขฐานสิบหกสามารถทำได้โดย การแบ่งกลุ่ม ๆ ละ 4 บิตดังนี้
0010 1010 1111 1101
จะเห็นว่าถ้าแบ่งเป็นกลุ่ม ๆ ละ 4 บิต จะมีสองบิตบนที่จัดกลุ่มไม่ได้ ก็ให้เติม 0 ไปในกลุ่มนั้นให้ครบ 4 บิต จากนั้นแทนค่าตัวเลขแต่ละกลุ่มด้วยเลขฐานสิบหกดังนี้
2 A F D
ดังนั้นจะได้ 10101011111101 มีค่าเท่ากับ 2AFD
ให้จำใว้ว่าเลขฐานสิบหกที่เรามองเห็นนั้นเป็นการใช้แทนเลขไบนารีเพราะ CPU ไม่สามารถประมวลผลเลขฐานสิบหกได้
ประเภทของข้อมูลเช่น บิต, ไบต์, เวิร์ด
ข้อมูลภายใน PLC จะมีคำจำกัดความที่เรียกกันคือ บิต (BIT), ไบต์ (Byte), เวิร์ด (Word) หลักการเรียกและความหมายของแต่ละคำมีดังนี้
1 Word = 2 Byte
1 Byte = 2 Digit
1 Digit = 4Bit
เช่น ข้อมูลขนาด 256 กิโลบิต (kBit) จะสามารถเก็บข้อมูลได้กี่กิโลไบต์ ?
8 บิต = 1 ไบต์
256 กิโลบิต = (256 x 1000)/8 = 32,000 ไบต์
= 32 กิโลไบต์
หน่วยความจำ ขนาด 6 kWords ถ้าจะเปลี่ยนหน่วยเป็น kB. จะได้เท่าไร ?
1 Word = 2 ไบต์
6 kWord = 2 x 6 x 1000 = 12,000 ไบต์
= 12 กิโลไบต์
ลอจิกเกต (LOGIC GATE)
PLC ทำงานด้วยหลักการของ binary คือ เป็นอย่างใดอย่างหนึ่งใน 2 สถานะ เช่น สูงหรือต่ำ
ปิดหรือเปิด, 0 หรือ 1 เกตเป็นสัญลักณ์ของวงจรที่่ใช้แทนลอจิก ระบบที่เรียกว่าพีชคณิตบูลลีนใช้แสดงอินพุตและเอาท์พุต เกตพื้นฐานมีดังนี้
อินเวอร์เตอร์ INVERTER-NOT
อินเวอร์เตอร์เป็นเกตที่มี 1 อินพุต 1 เอาท์พุตท์ วงจรให้เอาท์พุตที่ตรงข้ามกับอินพุต เช่นถ้าอินพุตเป็น 0 เอาท์พุตจะเป็น 1 ถ้าอินพุตเป็น 1 เอาท์พุตจะเป็น 0

A | Y |
0 | 1 |
1 | 0 |
แอนด์เกต AND GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มี 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตทุกตัวมีค่าเป็น 1 กรณีอื่นๆเอาท์พุตจะมีค่าเป็น 0
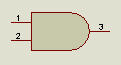
A | B | Y |
0 | 0 | 0 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 1 |
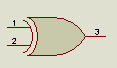
ออร์เกต OR GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มี 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่อตัวไดตัวหนึ่งมีค่าเป็น 1 เมื่ออินพุตทุกตัวมีค่าเท่ากับ 0 เอาท์พุตจะมีค่าเป็น 0
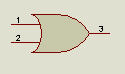
A | B | Y |
0 | 0 | 0 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 1 |
แนนด์เกต NAND GATE เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มีการทำงานตรงข้ามกับ แอนด์เกต(วงจรให้เอาท์พุตเป็น 0 เมื่ออินพุตทุกตัวมีค่าเป็น 1 กรณีอื่นๆค่าเอาท์พุตจะมีค่าเป็น 1 )

A | B | Y |
0 | 0 | 1 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 0 |
นอร์เกต NOR GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มีการทำงานตรงข้ามกับออร์เกต(วงจรจะให้เอาท์พุตเป็น 0 ก็ต่อเมื่ออินพุตตัวไดตัวหนึ่งมีค่าเป็น1)
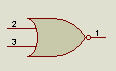
A | B | Y |
0 | 0 | 1 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 0 |
เอ็กซ์คลูซิฟออร์เกต X-OR GATE เป็นเกตที่มี 2 อินพุต 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตมีค่าต่างกัน ให้เอาท์พุตเป็น 0 เมื่ออินพุตมีค่าเหมือนกัน
A | B | Y |
0 | 0 | 0 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 0 |
เอ็กซ์คลูซิฟนอร์เกต X-NOR GATE เป็นเกตที่มี 2 อินพุต 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตมีค่าเหมือนกัน ให้เอาท์พุตเป็น 0 เมื่ออินพุตมีค่าต่างกัน

A | B | Y |
0 | 0 | 1 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 1 |
ไม่มีความคิดเห็น:
แสดงความคิดเห็น